Electrical Impedance Tomography (EIT) for Tactile Imaging the Basics Some of the take-home messages from the book Electrical Impedance Tomography for Tactile Imaging: A Primer for Experimentalists (IOP Publishing Ltd, Bristol, UK, 2024). are given here. The discussion assumes a little previous familiarity with EIT. On this page: Why do my images have lousy resolution? The most likely reason is
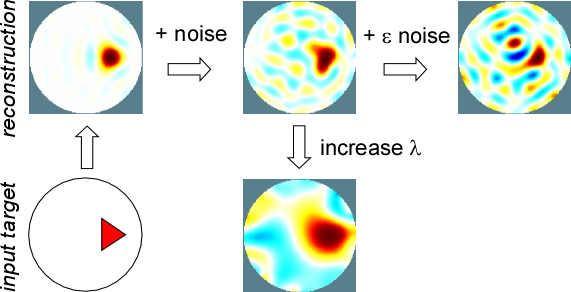
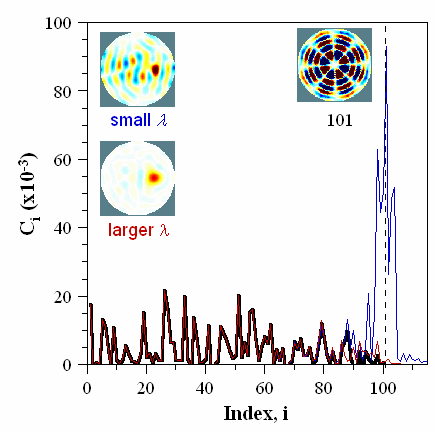
This figure shows how a larger λ results in loss of resolution. It also results in a reduction in amplitude (not shown in this figure, which did not employ normalized amplitudes). To be able to reduce the size of the hyperparameter, you must reduce noise in the signal (see below).
Another reason for poor resolution could be
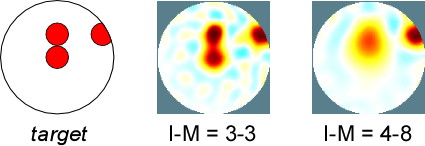
Some general rules of thumb regarding the I-M pattern are: never use a symmetric pattern (see the example in the figure) and for large hyperparameters avoid adjacent patterns (i.e. I-M = #-1). The overall best compromise for 16 electrodes and a circular sensor is the 3-3 pattern, but for particular imaging scenarios others may be better choices. For more information about which patterns to use, see the paper: E. Smela, "EIT for tactile sensing: considerations regarding the injection-measurement pattern," Eng. Res. Expr., 4 (4), 045041 (2022).
A third reason may be that
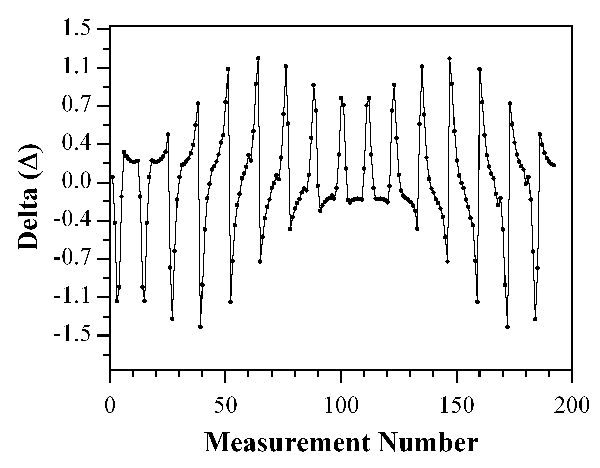
For tactile imaging you will likely want to use a 1-step algorithm because it allows real-time operation. The default algorithm in EIDORS is the Gauss-Newton (GN) 1 -step. While iterative algorithms can give higher fidelity images, they will not give you the imaging rates you will likely need. How should I think about noise? What is a tolerable level? Even noise that is orders of magnitude smaller than the signal interferes with image reconstruction. Before explaining further, let’s start by examining a typical “signal”, which is a series of voltage differences between a reference state in which the sensor is untouched and a state with a tactile contact, as shown in the figure.
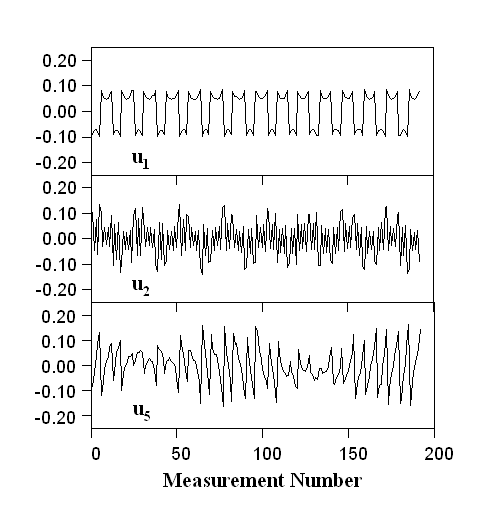
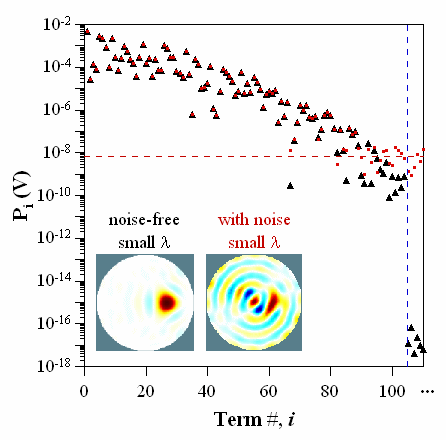
The Picard coefficients give the amplitudes, in units of V, of the ui that sum to form the signal. This is analogous to expressing waveforms with a Fourier expansion. If there is noise on the signal, the Picard coefficients, which specify the amplitudes of these terms in the sum, are incorrect, as shown in the next figure. The larger the noise, the smaller the number of meaningful terms (carrying true image information).
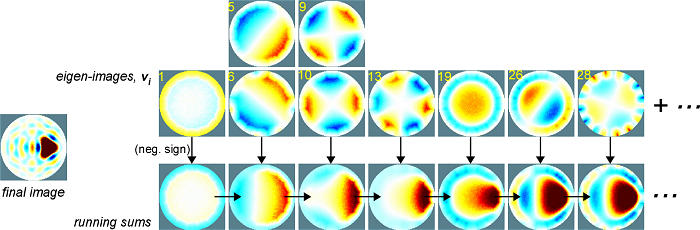
Picard coefficients Pi that are at or below the noise level add junk to the image, which must be eliminated by raising the hyperparameter. The hyperparameter is, in essence, a tunable low-pass filter that removes higher-i terms. The low-frequency information (coarse resolution) has high amplitude, but the image details (finer resolution, particularly in the center of the image) are carried in the many small-amplitude terms that are readily contaminated by noise. So, the lower the noise, the better your image fidelity can be. How exactly is the image affected? Each ui is linked, via singular values si, to an eigen-image vi. The vi sum to form the final conductivity change image, σ, as shown below (For illustrations of this in other contexts, see the excellent discussion by Bagheri and search online for examples of eigen-faces.)
What hyperparameter l should I use? In brief, the relationship between the hyperparameter and noise is linear. To determine the hyperparameter for tactile sensing, use the L-curve method. While some publications have suggested that hyperparameters given by this method are too large from the perspective of resolution (for medical imaging applications), they are optimal from the perspective of eliminating artefacts. Artefacts are the imaginary tactile contacts that appear in the image due to noise (see examples in the previous figures), which must be avoided if you are trying to detect transient tactile contacts. It is important to understand how the hyperparameter scales with experimental variables, so that you can compare your λ with those reported by others (when they do so: some publications dont understand EIT well enough to be aware that this parameter is important beware of those). The table shows how λ scales with the injected current I and the baseline sensor conductivity σ0. There should be no alteration of λ with conductivity changes Δσ (determined by the sensitivity of the sensor and the strength of the tactile contact).
Why doesnt increasing the number of electrodes improve resolution? Because your hyperparameter is too large. A larger number of electrodes only helps, and then only marginally, for ultra-low noise data. This is typically unrealistic for tactile imaging applications in which you are operating in real time. (For more information about this, refer to sections in the book.) In general, there is really no benefit to using more than 12 or 13 electrodes. (The latter has the benefit of eliminating symmetry.) As always, avoid the high-symmetry I-M patterns. Should I use a sensor with high resistance or low resistance? In a nutshell, from the imaging perspective, high resistance if you are using constant current injection, since it will give a higher voltage signal at the measurement electrodes (since V = IR). This may pose other disadvantages, however, such as greater power consumption (P = I2R) and sensor heating (which may increase noise). Which algorithm and prior are best? Use the GN 1-step for its speed and use the Laplace prior for its preservation of peak energy (Chapter 4, section 5). The latter means that information about the overall strength of the touch has the most spatial uniformity. The peak still broadens as λ increases, with the most broadening in the center of the image, but the integral under the curve remains about the same at all positions. For further information on pyEIT (as opposed to EIDORS in Matlab), see: https://github.com/eitcom/pyEIT
Page last updated: April 16, 2024 |
|
|
©2013